The semantics of ![]() employing labels L, constants C, and
variables V is defined with respect to the domain of feature
graphs, built from L, C, and V.
A feature graph is a directed
graph which is finite, rooted, and connected. Furthermore, the labels
of the edges leaving a node must be pairwise distinct. Every inner
node of a feature graph is a variable, and every terminal node is
either a variable or a constant. Edges are triples
Xlt
such that
X is a variable,
l is a label and t is
either a variable or a constant.
employing labels L, constants C, and
variables V is defined with respect to the domain of feature
graphs, built from L, C, and V.
A feature graph is a directed
graph which is finite, rooted, and connected. Furthermore, the labels
of the edges leaving a node must be pairwise distinct. Every inner
node of a feature graph is a variable, and every terminal node is
either a variable or a constant. Edges are triples
Xlt
such that
X is a variable,
l is a label and t is
either a variable or a constant.
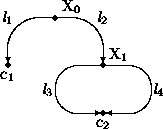
The following notation to traverse feature graphs is introduced. If F is a feature graph and p is a path, then F/p is the variable or constant that is reached from the root of F where the labels in the path correspond to the labels of the edges. For example consider the following feature graph
![]()
which is graphically represented in figure 2.1.
More formally, for p = l1...lk a path, and t a node (variable or atom), define t/p to be the node given as follows. If k = 0 then t/p = deft. Otherwise, t/l1...lk is defined to be the node t' if there is an edge labelled l1 from t to t'' and t' = t''/l2...lk (otherwise t/l1...lk is undefined). Furthermore, for F a feature graph with root X0, F/p = defX0/p.
A feature graph F is called a subgraph of a feature graph F' if the root of F is a variable or atom occurring in F' and every edge of F is an edge of F'. If F is a feature graph and s a node of F, then Fs denotes the unique maximal subgraph of F of which the root is s. In that case, Fs has as its root the node s, and as its edges are all those edges of the form tlt' present in F such that both t, t' are reachable from s in F. For example, if F1 is the feature graph in figure 2.1, then we have:
![]()
Furthermore, for F a feature graph and p a path, Fp denotes
the subgraph Fs where F/p = s, if
this is defined.
For example:
![]()
Otherwise Fp is undefined.